Notas

Esta misma proyección cinestésica puede ser fomentada por protésicos y terapeutas para ayudar a los usuarios de prótesis a crear una sensación de encarnación mediante el uso repetido y actividades específicas del usuario. Aunque a menudo se identifica con la manipulación de objetos por parte de las extremidades superiores, también se manifiesta en las extremidades inferiores cuando los usuarios exhiben un modo de andar muy suave que se integra con la imagen corporal. La necesidad de encarnación social proyectada en función y forma no es nueva. Algunos de los primeros dispositivos protésicos de diseño elocuente fueron utilizados por caballeros y guerreros para proyectar confianza, incluso hacia los enemigos. Los usuarios tenían que tener un alto grado de confianza en que la prótesis podría funcionar de manera constante en la batalla para su protección y la de los demás. El brazo protésico de Goetz von Berlichingen, un héroe popular alemán de principios del siglo XVI, aún se puede considerar hoy en día con la alta funcionalidad necesaria para sostener una lanza y un escudo mediante un sistema de resortes y pestillos. El Rigveda de la India antigua habla de la reina guerrera Vishpala en 1200 a. C. que usó una pierna ortopédica para montar su caballo en la batalla (o en una carrera; la traducción del texto original es confusa). Incluso en esta época temprana, había implicaciones sociales directas de la prótesis no solo para el usuario, sino también para aquellos en su contexto social.
Estimular el aprendizaje cinestésico-táctil
El estilo de aprendizaje cinestésico-táctil es uno de los cuatro estilos de aprendizaje aceptados con visual, auditivo y lectura/escritura. Los aprendices cinestésico-táctiles muestran talento para incorporar su sentido de propiocepción, o la conciencia cognitiva subconsciente de la posición en el espacio, y la cinestesia, la percepción conductual del movimiento que se puede aprender con el tiempo, también llamada memoria motora. Eres un aprendiz cinestésico si recuerdas y visualizas la actividad real de hacer algo en lugar de leer o escuchar sobre ello. Sin embargo, incluso si usted es un aprendiz kinestésico promedio, la competencia se puede abordar con enfoques repetidos e innovadores. La pregunta para los protésicos y terapeutas es cómo mejorar este aprendizaje y comprenderlo, así como los desafíos que lo inhiben.
Una herramienta para desarrollar esta habilidad es involucrar una mitad del cerebro para volver a imprimir en la otra. La neurona espejo somatosensorial también se puede estimular mediante el uso de la terapia del espejo, donde los usuarios de prótesis imitan el movimiento de sus manos intactas con el movimiento de sus manos protésicas. La retroalimentación visual del espejo, aunque es una ilusión, proporciona confirmación e impresión en los aspectos cognitivos del cerebro para aumentar el aprendizaje motor tácito inconsciente. Esto no solo tiene beneficios para el control de la prótesis, sino que también puede aumentar la conciencia del miembro fantasma necesario para sistemas de control más avanzados.
¿Alguna vez ha pisado una escalera mecánica inoperable o un transportador de personas y experimentó la extraña idea errónea del movimiento? Su cerebro simplemente esperaba movimiento debido a las experiencias previas de su corteza somatosensorial que se habían impreso en su corteza motora. Cuando pisabas el transportador de personas, se suponía que se movía, pero cuando no lo hacía, tenías una paradoja cognitiva. Cuando los pacientes esperan que sus prótesis funcionen y funcionen como extensiones de su cuerpo, pero no lo hacen, esto interrumpe el circuito de retroalimentación y la ilusión de que las prótesis son parte de ellos.
Los protésicos y terapeutas son ilusionistas
Los protésicos y los terapeutas ocupacionales (OT) trabajan para crear la ilusión de que la prótesis está integrada como parte de la imagen corporal de los pacientes. Esta ilusión se mejora con interfaces bien ajustadas al aumentar la sensación háptica (sensación del tacto) y optimizar el circuito de retroalimentación visual (el funcionamiento de los dispositivos genera un resultado exitoso), lo que permite a los pacientes desarrollar vínculos cognitivos más fuertes con sus prótesis. Esto no es solo exclusivo de las manos mioeléctricas, sino que también se aplica a los ganchos accionados por el cuerpo.
Las personas con extremidades intactas pueden experimentar control innato o unidad cuando operan maquinaria familiar o un automóvil. Otra forma es experimentar la ilusión de la mano de goma, en la que se protege la mano fisiológica y se coloca una mano de goma delante del sujeto. Los dedos de la mano fisiológica y la mano de goma se estimulan simultáneamente con un pincel de pintor durante aproximadamente un minuto. Cuando se golpea la mano de goma con un martillo, el sujeto notará un hormigueo en la mano fisiológica. (Visite youtu.be/sxwn1w7MJvk para ver una demostración).
Lo que también es interesante es que a medida que el cerebro adopta cognitivamente la prótesis, la mano fisiológica se enfriará un poco a medida que el cerebro se disocia y adopta la nueva mano porque la retroalimentación háptica y visual anula la conexión fisiológica del cerebro. La arquitectura del cerebro es mucho más plástica de lo que se pensaba. La capacidad de aprender varía de un paciente a otro dependiendo de cuándo ocurrió la amputación.
Redibujar el mapa cerebral de los pacientes
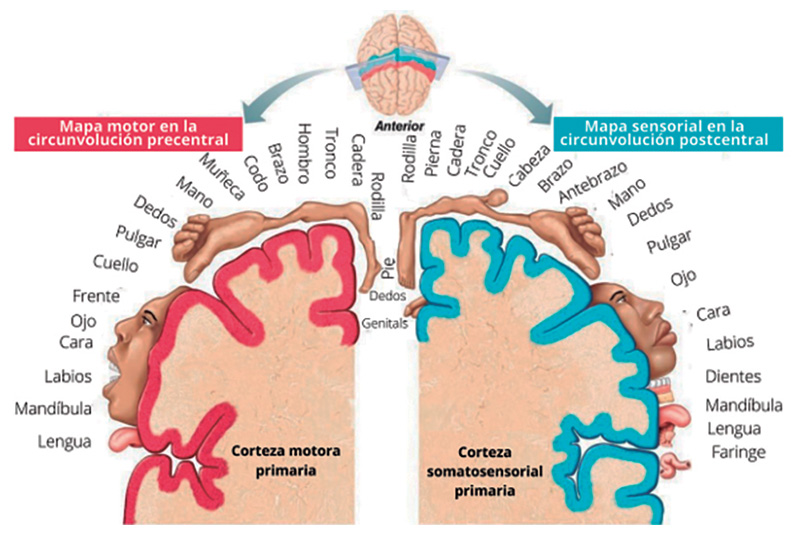
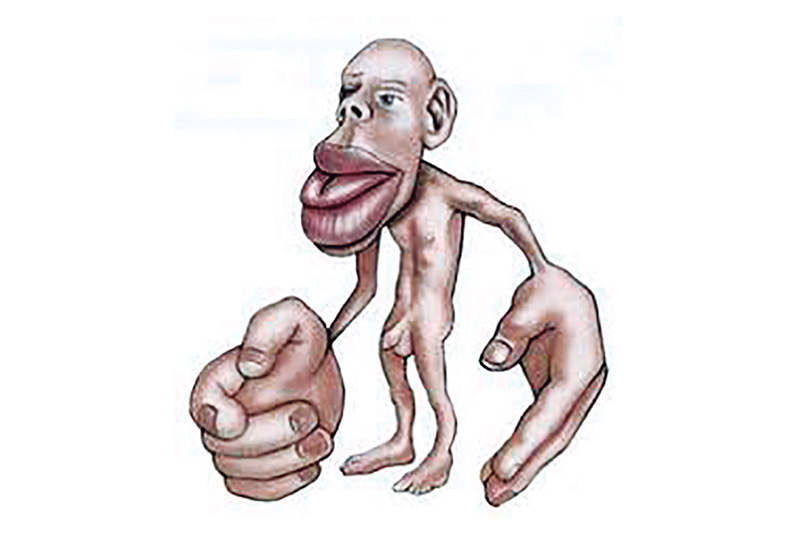
El homúnculo, literalmente llamado “hombrecito”, es la imagen que el cerebro tiene de sí mismo. En realidad, hay dos imágenes, una para la imagen sensorial y otra para la imagen de control motor. La importancia de la mano se puede observar en el homúnculo sensorial y motor donde una cuarta parte de nuestra corteza neural está dedicada a la mano con el mayor número de neuronas concentradas en el pulgar. Es fácil ver por qué después de una amputación las conexiones neurales permanecen, y el miembro fantasma está presente.
A las pocas semanas o meses de una amputación, el cerebro de muchos pacientes reorganizará el “espacio disponible” de la extremidad y puede volver a dedicarlo a la cara. Los experimentos han demostrado que la activación de áreas de la cara provocó una sensación simpática del miembro fantasma en el 42 por ciento de los pacientes.
Con la deficiencia congénita de las extremidades, el mapeo del cerebro puede ser diferente ya que no queda ninguna sensación previa de la extremidad fisiológica. El área del mapa sensorial del cerebro parece ser más pequeña. Sin embargo, algunos de estos pacientes informan que tienen un fantasma vestigial, lo que puede indicar que la “amputación” ocurrió en el útero debido al síndrome de la banda amniótica. Todavía hay mucho que aprender sobre las diferencias en el mapeo cerebral, ya que los pacientes congénitos parecen hacerlo bastante bien con el reconocimiento de patrones. Algunos especialistas en extremidades superiores e ingenieros de control describen que las personas con deficiencia congénita de las extremidades funcionan de manera similar a aquellas con cirugía de reinervación muscular dirigida donde se han reubicado las inervaciones musculares.
Comprender el ciclo de retroalimentación orgánica
Parte de comprender esta conexión cognitiva con la prótesis es comprender el circuito de control que utilizamos todos los días. Cualquier sistema de control, incluido un bulldozer o un elevador, tiene un programa de bucle de retroalimentación de control que comienza con una posición de referencia o calibrada. El sistema se corrige automáticamente a la posición, luego recibe la entrada del sistema para abrir, cerrar, subir, bajar, etc. El motor activa el movimiento, luego un sensor proporciona retroalimentación al sistema para verificar si el movimiento se ha ejecutado. Este mecanismo de control suele adoptar la forma de control por computadora, pero puede ser mecánico, como el carburador de un retrete o de una cortadora de césped, u orgánico, como nuestros sistemas biológicos.

Nuestro propio sistema de control orgánico utiliza nuestra programación cognitiva superior y reflejo inferior para calibrar nuestros sistemas. Los motores musculares se activan y la retroalimentación la proporcionan los sensores somato, o husos, en nuestros músculos, proteínas que detectan el estiramiento, así como la retroalimentación visual y háptica. El cálculo de la posición y la retroalimentación es un cómputo bastante complejo que puede verse comprometido, exhibiéndose como un temblor en pacientes con la enfermedad de Parkinson, por ejemplo.Este cálculo es mucho más difícil para los pacientes que usan prótesis de miembros superiores. Deben usar un circuito de retroalimentación secundario que no incluya algunos de los sensores de retroalimentación que necesitan. Por ejemplo, todavía están usando su propiocepción y cinestesia conscientes e inconscientes, pero luego deben confiar en los motores o las bandas de tensión de la prótesis para proporcionar la activación.
Esto se hace sin el uso de control háptico, pero principalmente con conciencia propioceptiva visual y parcial porque el cerebro debe adivinar lo que está sucediendo con la prótesis a través del acoplamiento de la interfaz. Esto se complica porque el control no suele ser intuitivo cuando la flexión glenohumeral da como resultado la apertura de la mano o la flexión/extensión de la muñeca está relacionada con la apertura y el cierre de la mano. El control es realmente un modelo o esquema artificial que no coincide con la función. Al igual que aprender una transmisión manual para un automóvil, la terapia y la práctica pueden ayudar a entrenar el circuito de retroalimentación a un nivel inconsciente, pero requiere repetición. Esta es la razón por la que el control intuitivo del reconocimiento de patrones reintroduce un esquema o control más intuitivo.
Esta interrupción del esquema de control intuitivo puede causar el más mínimo retraso para evitar la adopción cognitiva de la prótesis. La mano humana puede moverse rápidamente para agarrar objetos a una velocidad de hasta 4000 mm/s, pero a menudo se mueve a 310 mm/s durante el uso normal. Las manos protésicas más rápidas pueden moverse a poco más de 300 mm/s, por lo que pueden crear la ilusión del movimiento de una mano humana. Sin embargo, la retroalimentación del control sigue siendo un obstáculo. Cualquier pequeño retraso o compromiso en el control y la retroalimentación puede causar errores e interrumpir la adopción cognitiva. En su mayor parte, agarramos objetos con 5 libras de fuerza unas 1500 veces al día, por lo que cualquier error crea un elemento de desconfianza y ansiedad por parte del paciente. Un paciente dijo: “Usar mi prótesis es como hacer un truco de magia: la mayoría de las veces funciona, a veces no. Pero al igual que un truco de magia, está frente a todos para que la ilusión se desmorone”. Esto también habla del aspecto social de los dispositivos protésicos similares a los caballeros mencionados anteriormente. No solo aumenta la confianza del usuario, sino también la percepción del usuario de los demás a su alrededor.
El compromiso cognitivo y la confianza clínica pueden afectar la extremidad superior
En una encuesta anterior, los cinco factores que influyen en el 84 por ciento de la aceptación son, en orden de impacto: nivel de amputación (cuanto más proximal es la amputación, menor aceptación); el grado en que la prótesis cumple con las expectativas funcionales del paciente; comodidad relativa de la interfaz y el arnés, lo que puede indicar que los pacientes están dispuestos a tolerar una pequeña cantidad de incomodidad siempre que la prótesis haga lo que se supone que debe hacer; la confianza del protésico y la disponibilidad de terapia ocupacional. Las preocupaciones estéticas también se enumeran como un factor, lo que significa que la apariencia debe ser aceptable para los usuarios dentro de su contexto social y necesidad de función.

Estos factores funcionales y personales, que a menudo compiten entre sí, conspiran para mantener las tasas de aceptación protésica estimadas en 79,6 % para transradial, 57,8 % para transhumeral y 32,8 % para desarticulación de hombro. Incluso con todas las ventajas tecnológicas en materiales, controles de microprocesador, sensores de control, potencia fuentes y diseño mecánico, estas tasas de aceptación siguen siendo bastante similares a las tasas de aceptación descritas en 1958, que fueron del 75 por ciento para transradial, 61 por ciento para transhumeral y 35 por ciento para desarticulación del hombro. Como resultado, uno puede cuestionar si las mejoras tecnológicas han tenido mucho efecto en la aceptación de los dispositivos protésicos. Los usuarios individuales de los diversos componentes protésicos sin duda indicarán que sus prótesis satisfacen sus necesidades funcionales y sociales. Puede ser que estas necesidades varíen mucho de un paciente a otro y cambien dinámicamente a lo largo de la vida del paciente. La aceptación general puede no ser solo el uso de la tecnología, sino el grado en que interactúa con las necesidades cognitivas del usuario de la prótesis.
Las principales especificaciones de la mano protésica son la velocidad fisiológica, la fuerza de agarre funcional, la posición y el control, la rigidez de agarre suficiente y el número máximo de opciones de agarre. Uno de los factores limitantes de cualquier diseño de mano es que el paciente utiliza información visual para proporcionar posicionamiento y control. Los sistemas impulsados por el cuerpo a menudo brindan más retroalimentación cinestésica propioceptiva ya que se utiliza un movimiento motor grueso para medir el movimiento. Sin embargo, los diseños con alimentación externa brindan una mayor cantidad de operación sin arnés con mayor rigidez y fuerza de agarre casi fisiológica.
Promesa del futuro
Los sistemas mioeléctricos originales, disponibles por primera vez a principios de la década de 1970, lograron un número significativo de estas funciones, incluida la velocidad, el control, la durabilidad y la fuerza de agarre. Con un mayor desarrollo de diseños de manos multiarticulares, la función ha evolucionado para incluir control intuitivo, múltiples grados de libertad, modos de dedos articulados, velocidad casi fisiológica, sentido del tacto, retroalimentación de presión y más. En muchos casos, el mecanismo ha superado la capacidad y la tecnología de los pacientes para controlarlos.
Mediante el uso de la combinación de terapia, diseño, retroalimentación y función contextual, los investigadores de O&P trabajan para aumentar la tasa de adopción por parte de los pacientes y el grupo social en el que viven. El logro de la integración cognitiva total nos impulsa a la nueva tecnología y nos acerca a el objetivo de la encarnación intuitiva. La retroalimentación adicional en forma de control háptico, posicional y de fuerza en combinación con enfoques innovadores en la terapia prometen ayudar a hacer realidad este objetivo.
Gerald Stark, PhD, MSEM, CPO/L, FAAOP(D), es el director de asuntos clínicos de Ottobock Patient Care en Austin, Texas.
por Gerald Stark, PhD, MSEM, CPO/L, FAAOP(D) – Extracción The O&P Edge